Advances in the application of DRL for flow control
Andre Weiner,, Tom Krogmann, Janis Geise
TU Braunschweig, Institute of Fluid
Mechanics
Outline
- DRL for closed-loop active flow control
- Optimal sensor placement
- Model-based PPO
Closed-loop active flow control
motivation for closed-loop active flow control
- adaptation to more than one design point
- more efficient than open-loop control
How to find the control law?
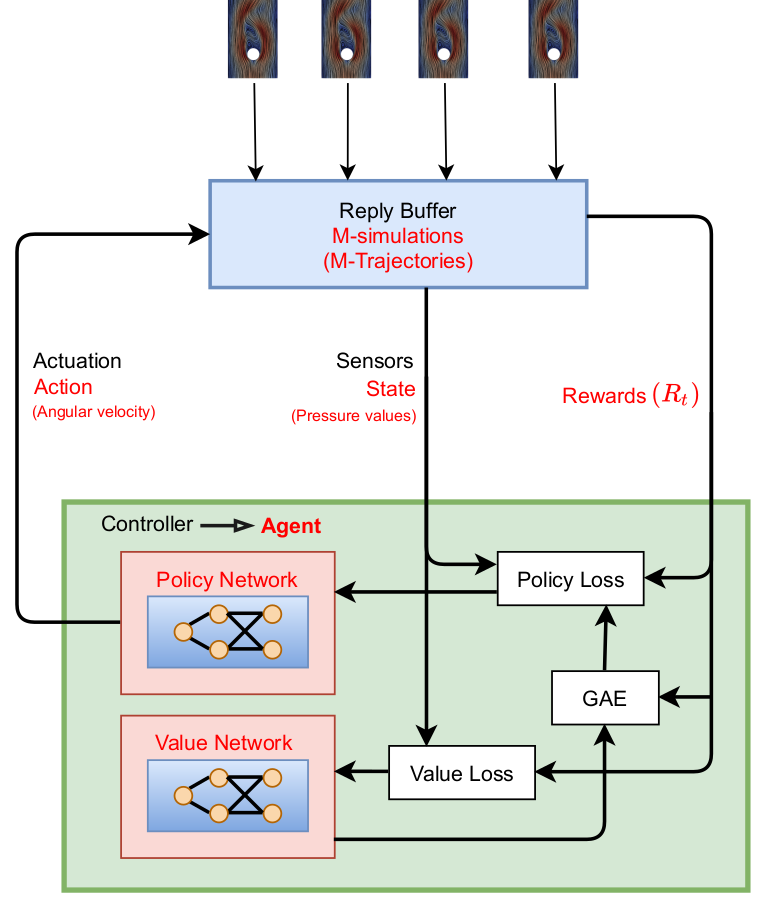
Proximal policy optimization (PPO) workflow (GAE - generalized advantage estimate).
Training cost DrivAer model
- $8$ hours/simulation (2000 MPI ranks)
- $10$ parallel simulations
- $3$ episodes/day
- $60$ days/training (180 episodes)
- $60\times 24\times 10\times 2000 \approx 30\times 10^6 $ core hours
CFD environments are expensive!
Optimal sensor placement
Tom Krogmann, Github, 10.5281/zenodo.7636959
Challenge with optimal sensor placement and flow control:
actuation changes the dynamical system
Idea: combined sensor placement and flow control optimization via attention layer
$$\mathbf{f} = \mathbf{W}_2\mathrm{tanh}(\mathbf{W}_1\mathbf{x}_{in})$$
$\mathbf{W}_1\in \mathbb{R}^{N_b\times N_{in}}$, $\mathbf{W}_2\in \mathbb{R}^{N_{in} \times N_b}$, $N_b < N_{in}$
$$ \kappa_i = \mathrm{exp}(f_i)/\sum_i\mathrm{exp}(f_i)$$
$\kappa_i$ - attention weight of sensor $i$
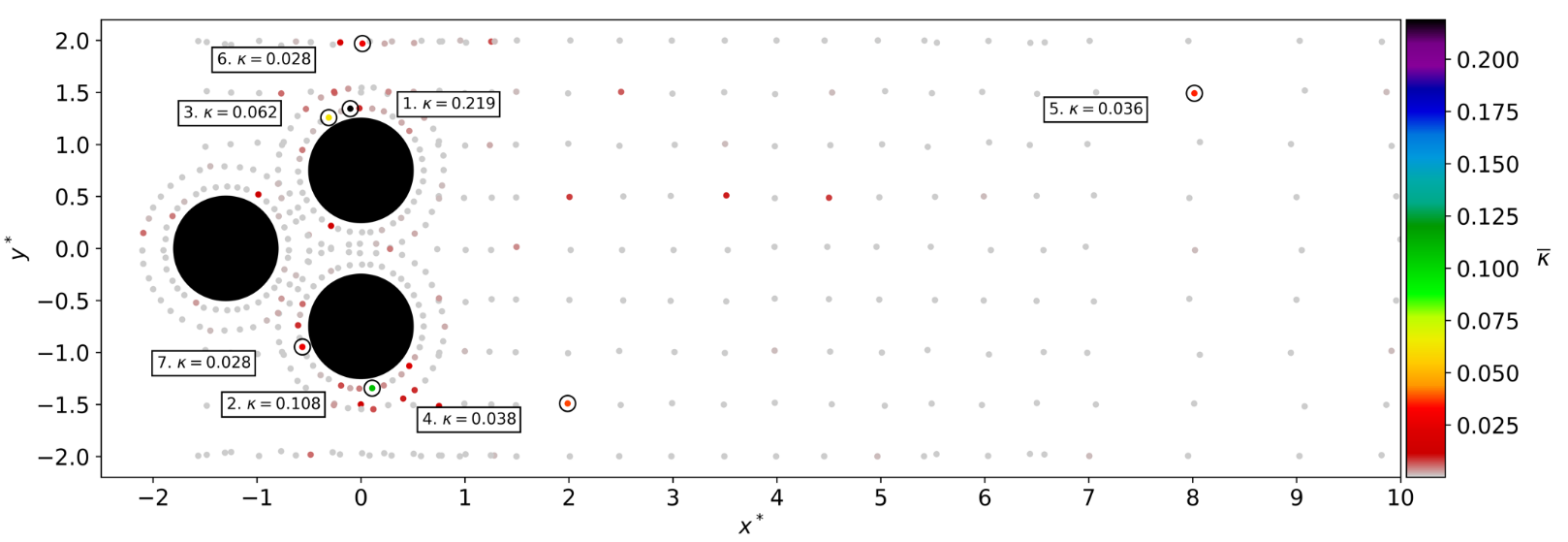
Time-averaged attention weights $\bar{\kappa}$.
Results obtained with top 7 sensors (MDI - mean decrease of impurity, modes - QR column pivoting).
Model-based PPO
Janis Geise, Github, 10.5281/zenodo.7642927
Idea: replace CFD with model(s) in some episodes
for e in episodes:
if models_reliable():
sample_trajectories_from_models()
else:
sample_trajectories_from_simulation()
update_models()
update_policy()
Based on Model Ensemble TRPO.
When are the models reliable?
- evaluate policy for every model
- compare to previous policy loss
- switch if loss did not decrease for
at least $50\%$ of the models
How to sample from the ensemble?
- pick initial sequence from CFD
- fill buffer with trajectories
- select random model
- sample action
- predict next state
Recipe to create env. models:
- input/output normalization
- fully-connected, feed-forward
- time delays (~30)
- layer normalization
- batch training (size ~100)
- learning rate decay (on plateau)
- "early stopping"
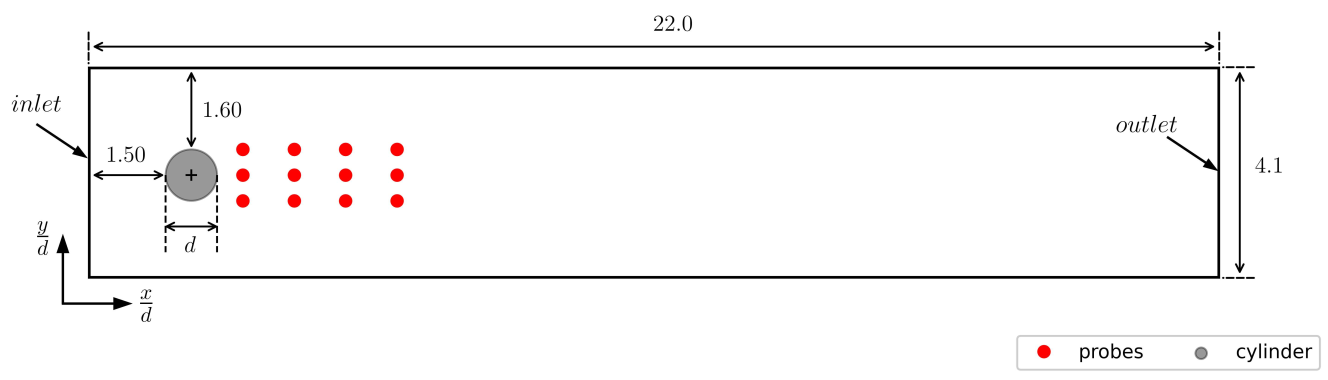
Cylinder benchmark case; $Re=100$.
control objective
$$r = c_{d,ref} - (c_d + 0.1|c_l|)$$
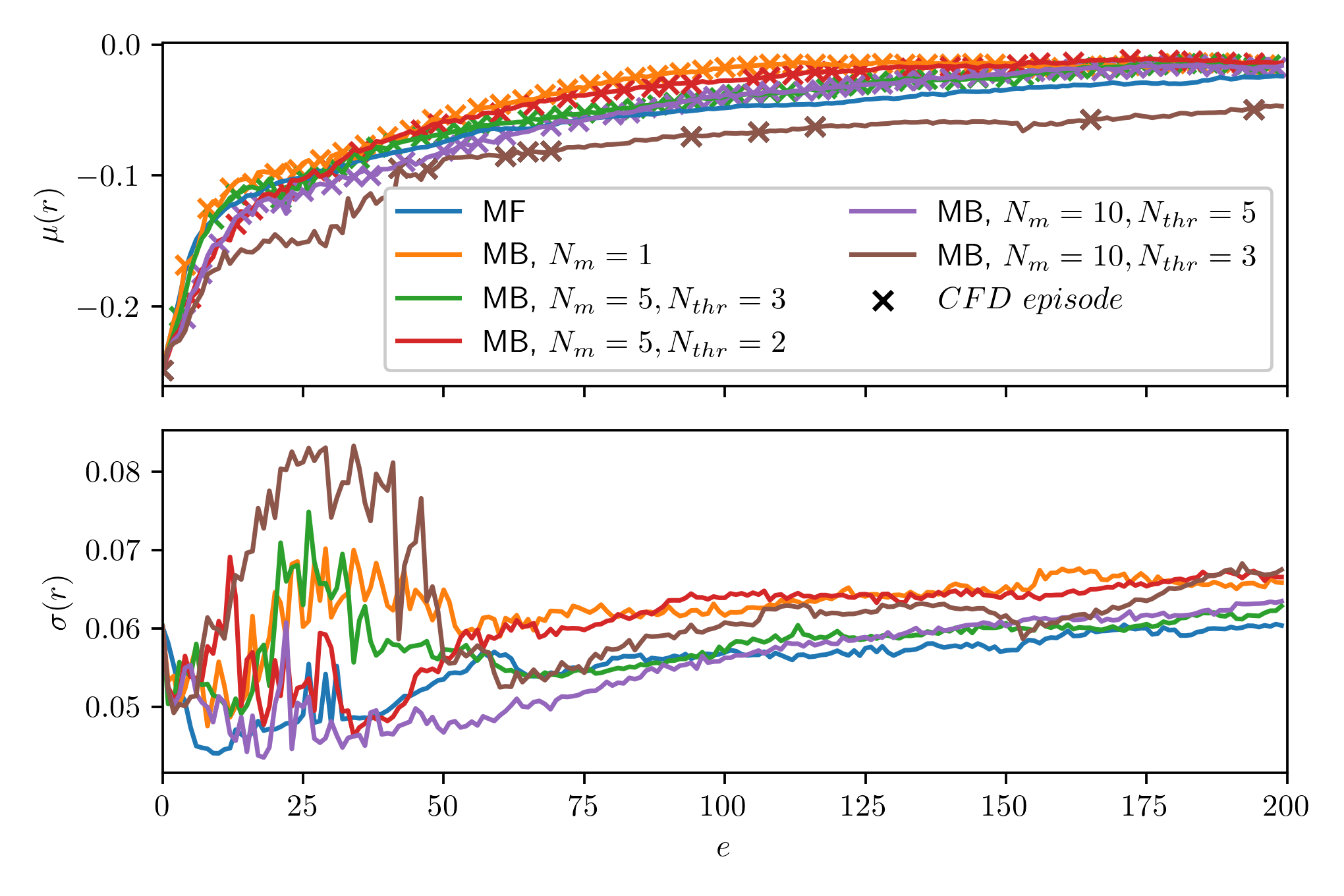
Rewards over episodes; mean/std. over 10 trajectories and 5 seeds; markers indicate CFD episodes.
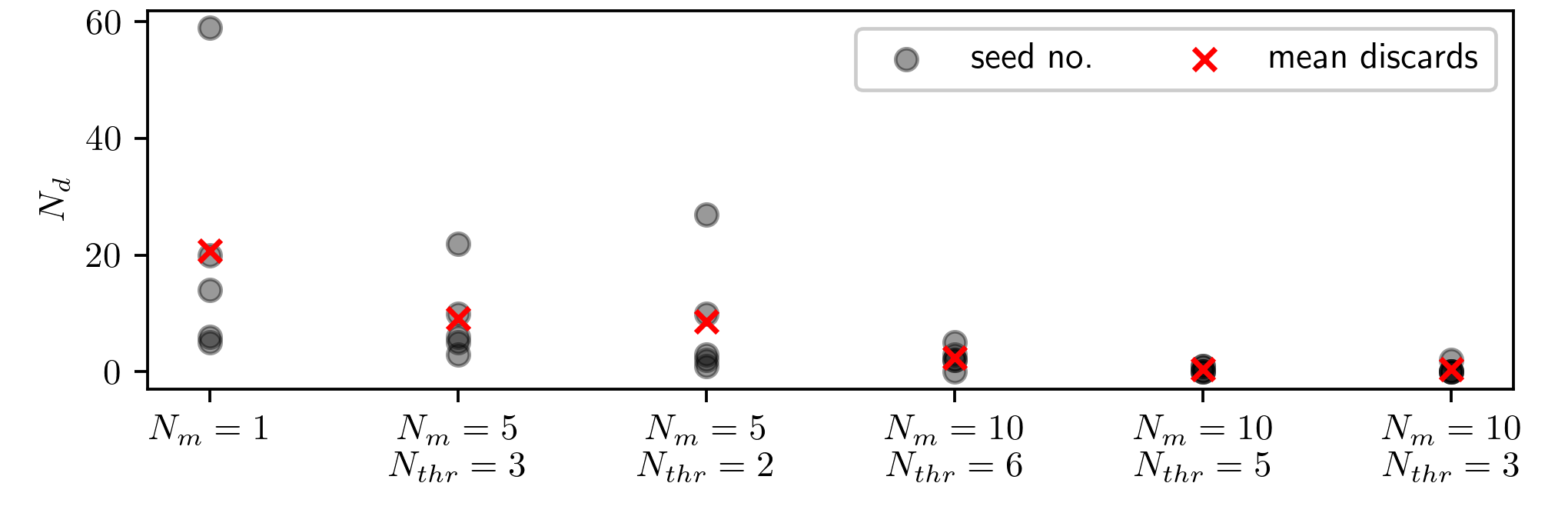
Number of discarded trajectories $N_r$ for various ensembles.
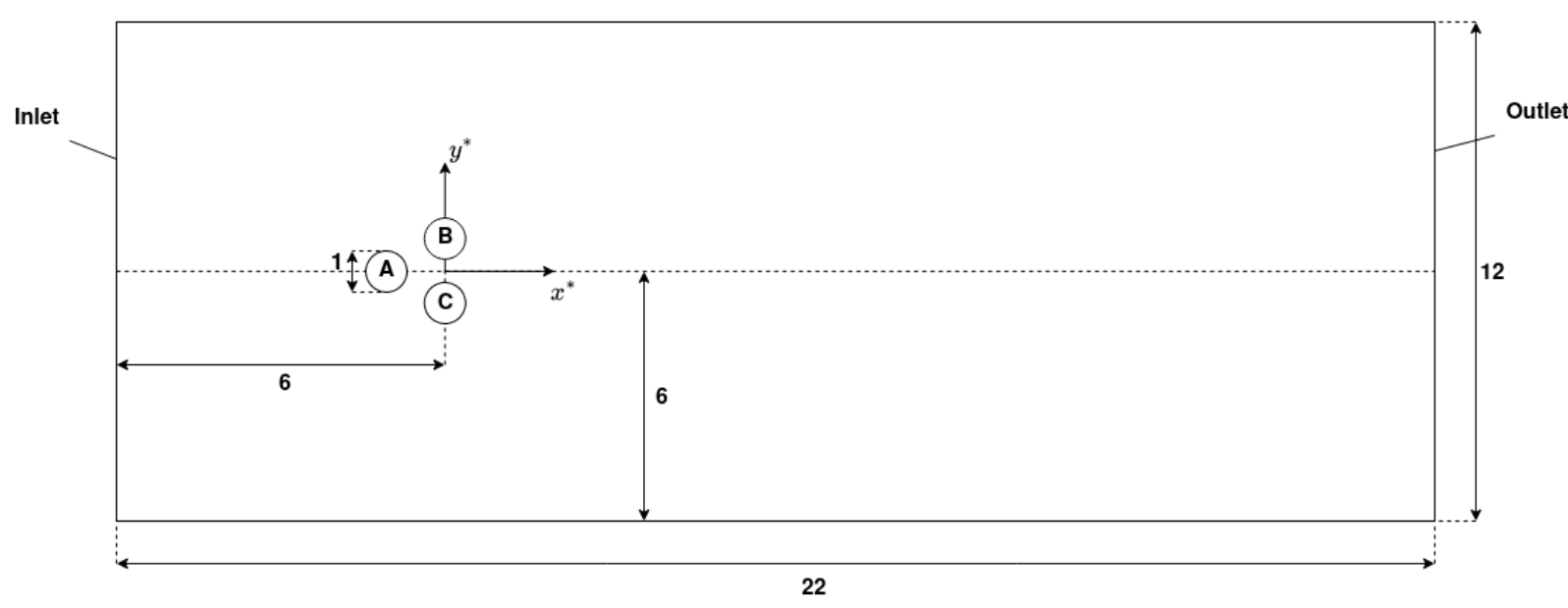
Pinball benchmark case; $Re=100$.
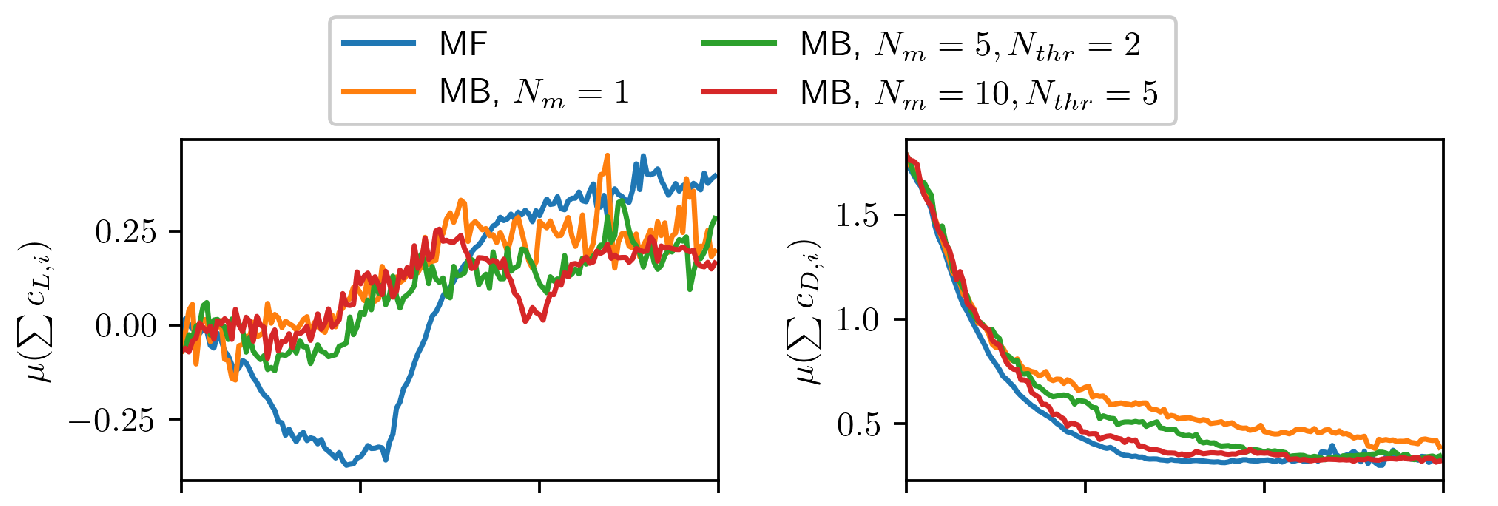
Mean drag/lift over episodes.
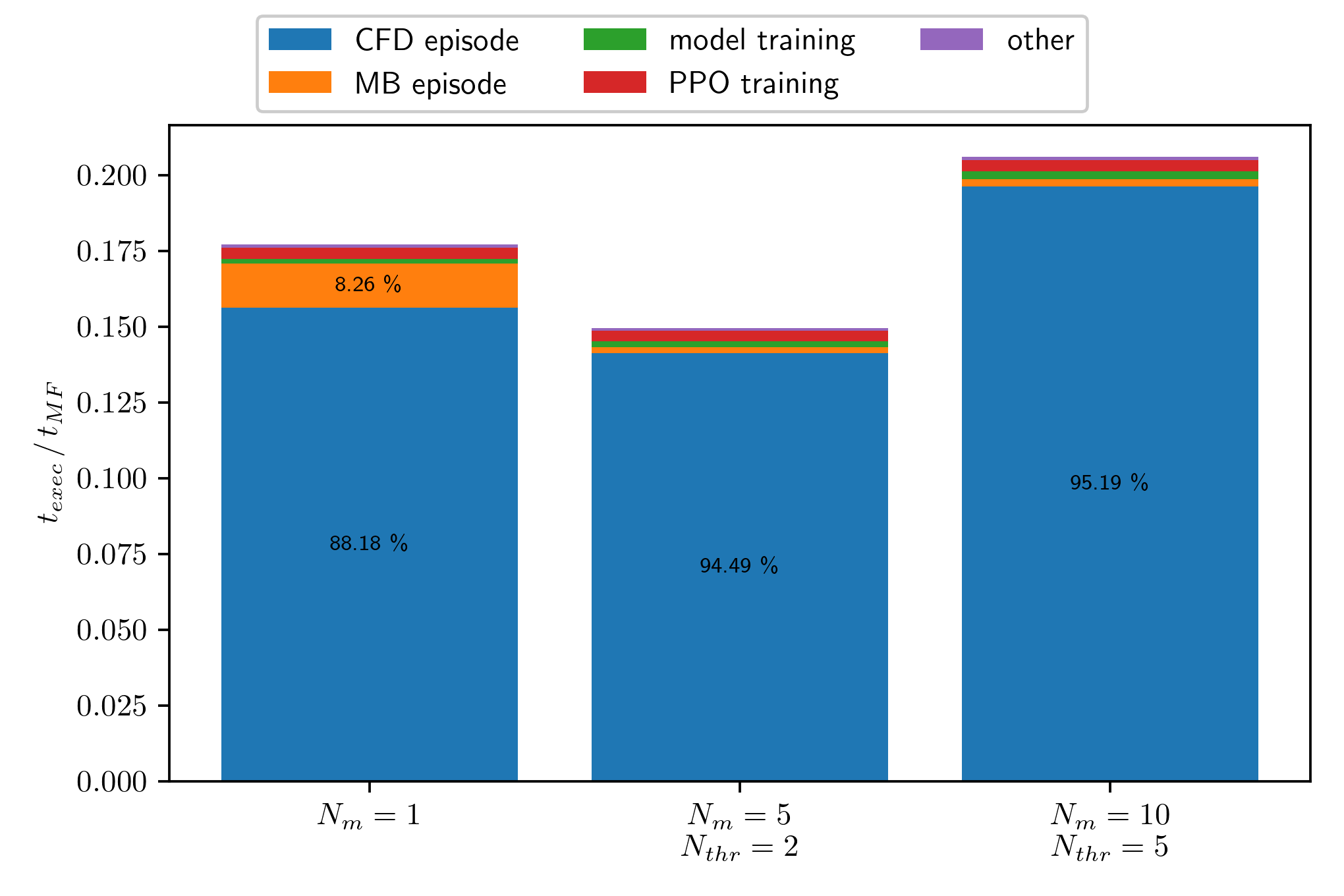
Execution time $t_{exec}$ for various ensembles normalized by model-free training time $t_{MF}$.
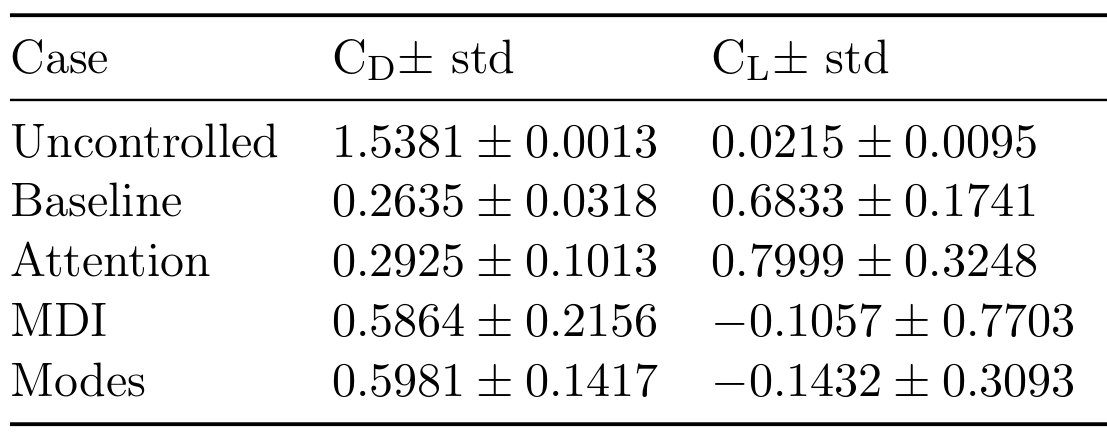
Evaluation of final policy.