Closed-loop flow control enabled by DRL
Andre Weiner
TU Dresden, Institute of fluid mechanics, PSM

These slides and most
of the linked resources are licensed under a
Creative Commons Attribution 4.0
International License.

Last lecture
Reduced-order modeling of flow fields
- reduced-order models for dynamical systems
- optimized DMD
- dealing with high-dimensional data
Outline
Controlling the flow past a cylinder
- Flow control
- Elements of reinforcement learning
- Elements of deep reinforcement learning
- Proximal policy optimization
Active flow control
Goals of flow control:
- drag reduction
- load reduction
- process intensification
- noise reduction
- ...
Categories of flow control:
- passive: modification of geometry, topology, fluid, ...
- active: flow actuation through moving parts, blowing/suction, heating/cooling, ...
Active flow control can be more effective but requires energy.
Categories of active flow control:
- open-loop: actuation prescript; constant or periodic motion, blowing, heating, ...
- closed-loop: actuation based on sensor input
Closed-loop flow control can be more effective but defining the control law is extremely challenging.
Flow past a circular cylinder at $Re=100$.
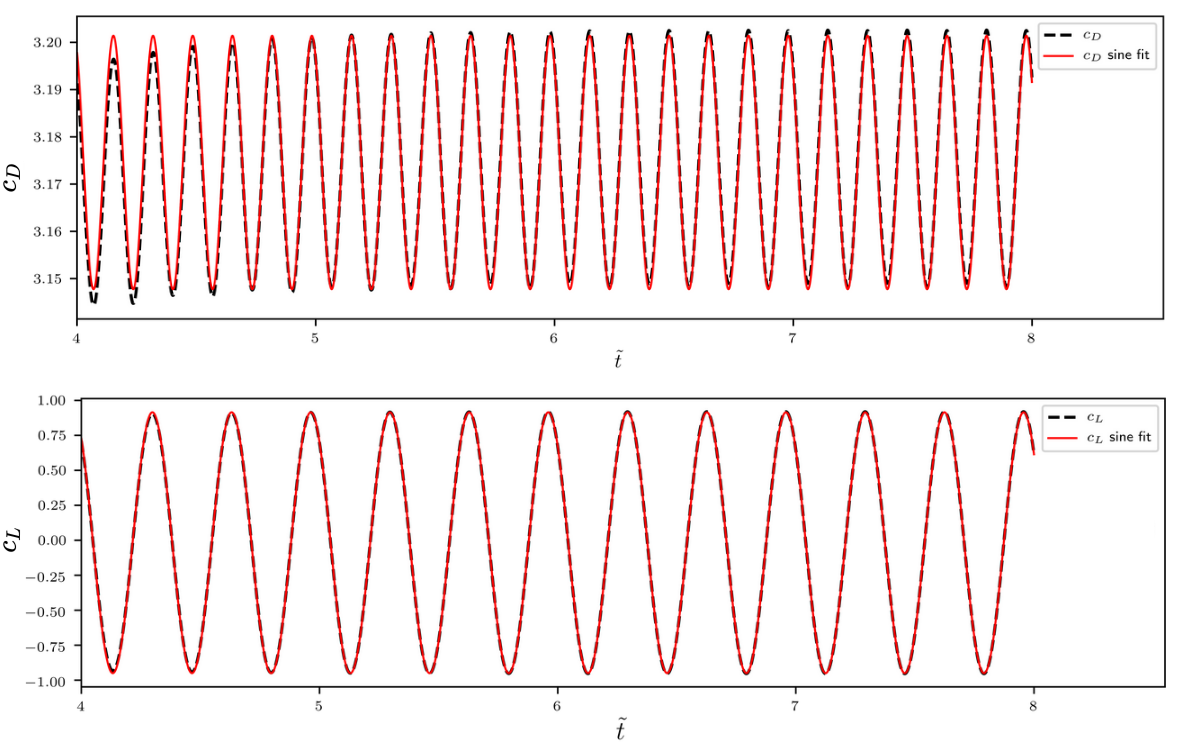
Drag and lift coefficients for the cylinder surface; source: figure 2.9 in D. Thummar 2021.
Typical steps in open-loop control:
- define (parametrized) control law
- optional: optimize control law
- define loss/objective function
- optimize control law iteratively
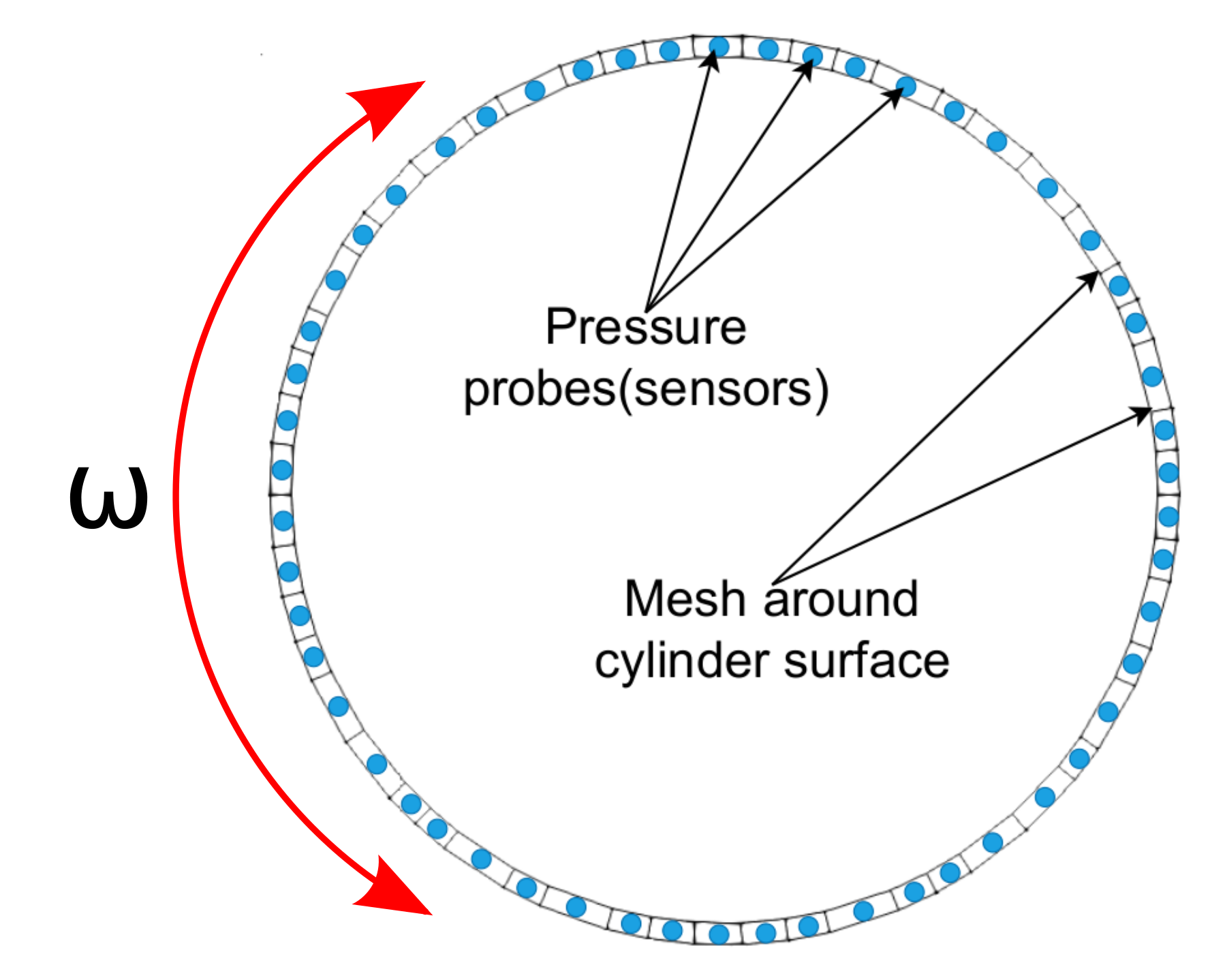
Open-loop example:
- periodic cylinder rotation with
$$\omega = A \mathrm{sin}(2\pi ft) $$ - optimization of $A$ and $f$ by searching
- loss
$$\Phi = \sqrt{\bar{C_D}^2 + \bar{C_L}^2 + (C_{D_{max}}-C_{D_{min}})^2 +(C_{L_{max}}-C_{L_{min}})^2}$$ - $\Omega = d/(2\bar{U}) A$ and $S_f = d/\bar{U}f$
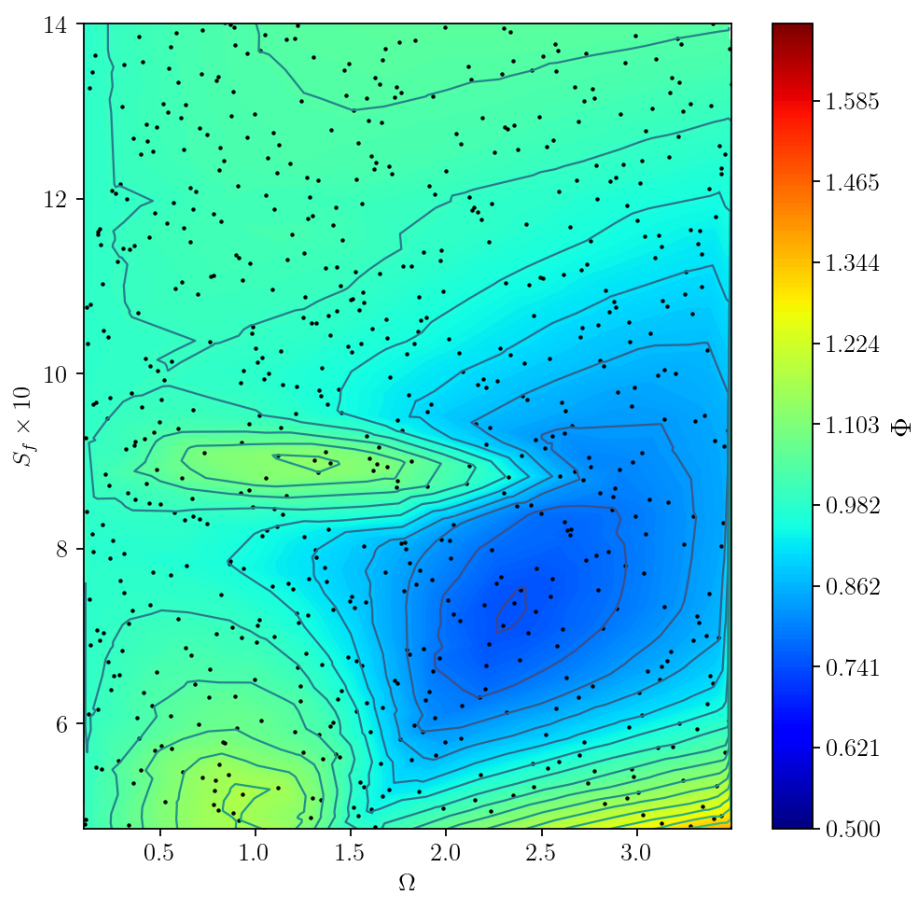
Loss landscape for periodic control; source: figure 3.5 in D. Thummar 2021.
Closed-loop example: $\omega = f(\mathbf{p})$.
Closed-loop flow control with variable Reynolds number; source: F. Gabriel 2021.
How to find the control law?
- careful manual design
- Bayesian optimization
- machine learning control (MLC)
- (deep) reinforcement learning (DRL)
Favorable attributes of DRL:
- sample efficient thanks to NN-based function approximation
- discrete, continuous, or mixed states and actions
- control law is learnt from scratch
- can deal with uncertainty
- high degree of automation possible
Why CFD-based closed-loop control via DRL?
- save virtual environment
- prior optimization, e.g., sensor placement
Main challenge: CFD environments are expensive!
Elements of reinforcement learning

Reinforcement learning cycle.
The agent:
- interacts, evaluates, improves
- acts on the environment following a policy $\pi$
- observes how the state changes
- receives a reward from the environment
- evaluates and improves policy
The environment at time step $n$:
- is defined by a state $S_n$
- transitions from $S_n$ to $S_{n+1}$ when acted on
- returns a reward $R_n$
- defines an extrinsic task expressed by reward
State $S_n\in \mathcal{S}$:
- defines environment
- can be discrete, continuous, or mixed
- lies in the state space $\mathcal{S}$
- are typically not fully available $\rightarrow$ observation
- change upon action according to transition function
Note that state and observation are typically used as synonyms.
Action $ A_n\in \mathcal{A}(s)$:
- is determined by policy $\pi (s)$
- lies in the action space $\mathcal{A}(s)$
- may be state-dependent
- can be discrete, continuous, or mixed
Even more definitions:
- task: overall goal; episodic or continuing
- time step $n$: one interaction between agent and environment
- episode: cumulation of time steps in episodic tasks
- horizon: time step limit; finite or infinite
- experience tuple: $\{ S_n, A_n, R_{n+1}, S_{n+1}\}$
- trajectory: all experience tuples in an episode
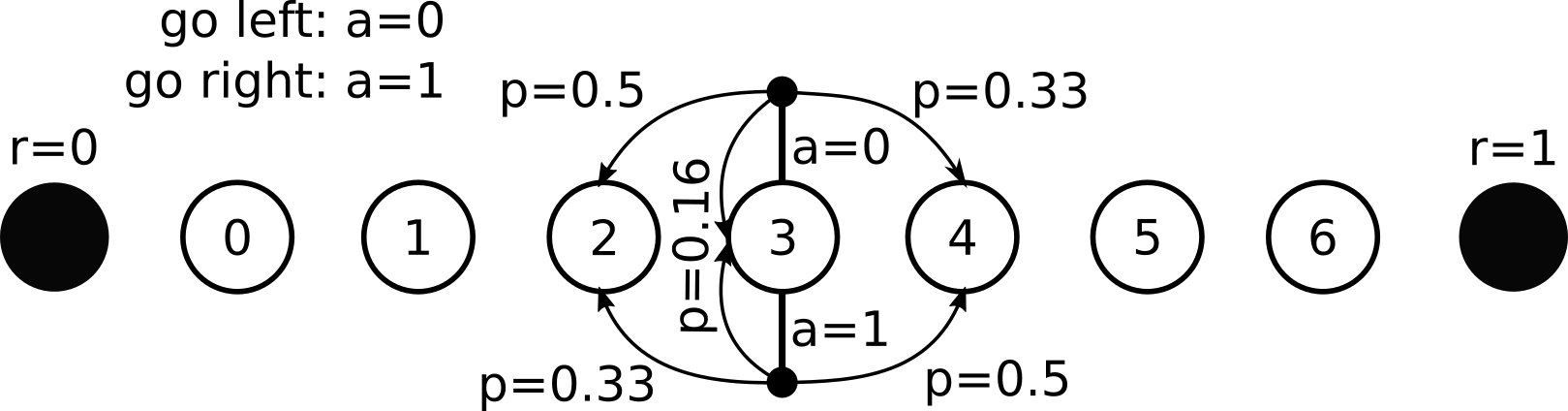
Describing uncertainty: "slippery walk" presented as Markov decision process (MDP).
Markov property:
$$ P(S_{n+1}|S_n, A_n) = P(S_{n+1}|S_n, A_n, S_{n-1}, A_{n-1}, ...) $$
May be relaxed in practice by adding several time levels to the state.
Transition function:
$$ p(s^\prime | s, a) = P(S_{n}=s^\prime | S_{n-1} = s, A_{n-1} = a) $$
Reward function:
$$ r(s, a) = \mathbb{E}[R_{n} | S_{n-1}=s, A_{n-1}=a] $$
Slippery walk in gym/gym_walk:
env = gym.make('SlipperyWalkSeven-v0')
init_state = env.reset()
P = env.env.P
list(P.items())[-2:]
# output
[(7,
{0: [(0.5000000000000001, 6, 0.0, False),
(0.3333333333333333, 7, 0.0, False),
(0.16666666666666666, 8, 1.0, True)],
1: [(0.5000000000000001, 8, 1.0, True),
(0.3333333333333333, 7, 0.0, False),
(0.16666666666666666, 6, 0.0, False)]}),
(8,
{0: [(0.5000000000000001, 8, 0.0, True),
(0.3333333333333333, 8, 0.0, True),
(0.16666666666666666, 8, 0.0, True)],
1: [(0.5000000000000001, 8, 0.0, True),
(0.3333333333333333, 8, 0.0, True),
(0.16666666666666666, 8, 0.0, True)]})]
- state space: $s\in \{0, 1, 2, 3, 4, 5, 6, 7, 8 \}$
- action space: $a \in \{0, 1\}$
- reward space: $r \in \{0, 1\}$
- experience tuple: $(3, 0, 0, 4)$
- trajectory: $((5, 0, 0, 6), (6, 1, 0, 7), ...)$
What is the meaning of $(3, 0, 0, 4)$?
- action go right
- transition from 4 to 3
- reward of 0
Why might the CFD environment be uncertain?
- random actions
- random state changes
- incomplete state (observation)
Intuitively, what is the optimal policy?
- always go left
- always go right
- alternate left and right
- depends on initial state
- it doesn't matter - all policies optimal
Dealing with sequential feedback:
return: $$ G_n = R_{n+1} + R_{n+2} + ... + R_N $$
discounted return: $$ G_n = R_{n+1} + \gamma R_{n+2} + \gamma^2 R_{n+3} + ... \gamma^{N-1}R_N $$
$N$ - number of time steps, $\gamma$ - discounting factor, typically $\gamma = 0.99$
recursive definition: $$ G_n = R_{n+1} + \gamma R_{n+2} + \gamma^2 R_{n+3} + ... \gamma^{N-1}R_N $$ $$ G_{n+1} = R_{n+2} + \gamma R_{n+3} + \gamma^2 R_{n+4} + ... \gamma^{N-1}R_N $$ $$ G_n = R_{n+1} + \gamma G_{n+1} $$
Why should we discount?
rewards trajectory 1: $(0, 0, 0, 0, 1)$
rewards trajectory 2: $(0, 0, 0, 0, 0, 0, 1)$
Which one is better?
returns: 1 and 1
discounted returns: $0.99^5\cdot 1$ and $0.99^7\cdot 1$
$\rightarrow$ discounting expresses urgency
Returns combined with uncertainty: the state-value function
$$ v_\pi (s) = \mathbb{E}_\pi [G_n| S_n=s] = \mathbb{E}_\pi [R_{n+1} + \gamma G_{n+1}| S_n=s] $$ In words: the value function expresses the expected return at time step $n$ given that $S_n = s$ when following policy $\pi$.
How to compute the value-function if the MDP is known? - Bellman equation
$$ v_\pi (s) = \mathbb{E}_\pi [R_{n+1} + \gamma G_{n+1}| S_n=s] $$ $$ v_\pi (s) = \sum\limits_{s^\prime , r, a} p(s^\prime,r| s, a) [r + \gamma \mathbb{E}_\pi [G_{n+1} | S_{n+1} = s^\prime)]] $$ $$ v_\pi (s) = \sum\limits_{s^\prime , r, a} p(s^\prime,r| s, a) [r + \gamma v_\pi (s^\prime)]\quad \forall s\in S $$
$s^\prime$ - next state; deterministic actions assumed
Intuitively, which state has the highest value?
- 0
- 3
- 5
- 6
- all equal
What action to take? The state-action function:
$$ q_\pi (s, a) = \mathbb{E}_\pi [G_n | S_n = s, A_n=a] $$ $$ q_\pi (s, a) = \mathbb{E}_\pi [R_{n+1} + \gamma G_{n+1} | S_n = s, A_n=a] $$ $$ q_\pi (s, a) = \sum\limits_{s^\prime , r} p(s^\prime,r| s, a)[r + \gamma v_\pi (s^\prime)]\quad \forall s\in S, \forall a\in A $$
Intuitively, what would you expect $q_\pi (s, a=0)$ vs. $q_\pi (s, a=1)$ ?
- $q_\pi (s, a=0) > q_\pi (s, a=1)$
- $q_\pi (s, a=0) = q_\pi (s, a=1)$
- $q_\pi (s, a=0) < q_\pi (s, a=1)$
How much better is an action? - action-advantage function
$$ a_\pi (s,a) = q_\pi(s,a) - v_\pi(s) $$
The optimal policy:
$$ v^\ast (s) = \underset{\pi}{\mathrm{max}}\ v_\pi (s)\quad \forall s\in \mathcal{S} $$ $$ q^\ast (s, a) = \underset{\pi}{\mathrm{max}}\ q_\pi (s, a)\quad \forall s\in \mathcal{S}, \forall a\in \mathcal{A} $$
Planning: finding $\pi^\ast$ with value iterations
$$ v_{k+1}(s) = \underset{a}{\mathrm{max}}\sum\limits_{s^\prime, r} p(s^\prime , r | s, a)[r+\gamma v_k(s^\prime)] $$
$v_k$ - value estimate at iteration $k$
Value iteration implementation:
def value_iteration(P: Dict[int, Dict[int, tuple]], gamma: float=0.99, theta: float=1e-10):
V = pt.zeros(len(P))
while True:
Q = pt.zeros((len(P), len(P[0])))
for s in range(len(P)):
for a in range(len(P[s])):
for prob, next_state, reward, done in P[s][a]:
Q[s][a] += prob * (reward + gamma * V[next_state] * (not done))
if pt.max(pt.abs(V - pt.max(Q, dim=1).values)) < theta:
break
V = pt.max(Q, dim=1).values
pi = lambda s: {s:a for s, a in enumerate(pt.argmax(Q, dim=1))}[s]
return Q, V, pi
Optimal action-value function:
optimal_Q, optimal_V, optimal_pi = value_iteration(P)
optimal_Q[1:-1]
# output
tensor([[0.3704, 0.6668],
[0.7902, 0.8890],
[0.9302, 0.9631],
[0.9768, 0.9878],
[0.9924, 0.9960],
[0.9976, 0.9988],
[0.9993, 0.9997]])
Why is it called reinforcement learning and not planning?
- both are equivalent
- reward function unknown
- transition function unknown
- reward and transition function unknown
Elements of deep reinforcement learning
Deep RL uses neural networks to learn function approximations of:
- the action-value function
- the value function
- the policy
- the environment
- combinations of all points above
Some DRL lingo:
- Value-based methods: approximation of action-value function; NFQ, DQN, DDQN
- Policy-gradient methods: approximation of policy; REINFORCE, VPG
- Model-based methods: approximation of environment; PILCO, METRPO
- Actor-critic methods: approximation of policy and value function with bootstrapping; A2C, PPO
General learning strategy:
- initialize random policy/action-value functions
- sample trajectory/trajectories from one or more environments
- update network(s)
- go back to 2. until convergence
How do DRL agents explore?
- discrete actions: equivalent to tabular methods
- continuous actions:
- add noise to action
- sample action from PDF
PDF - probability density function
Proximal policy optimization
Closed-loop example: $\omega = f(\mathbf{p})$.
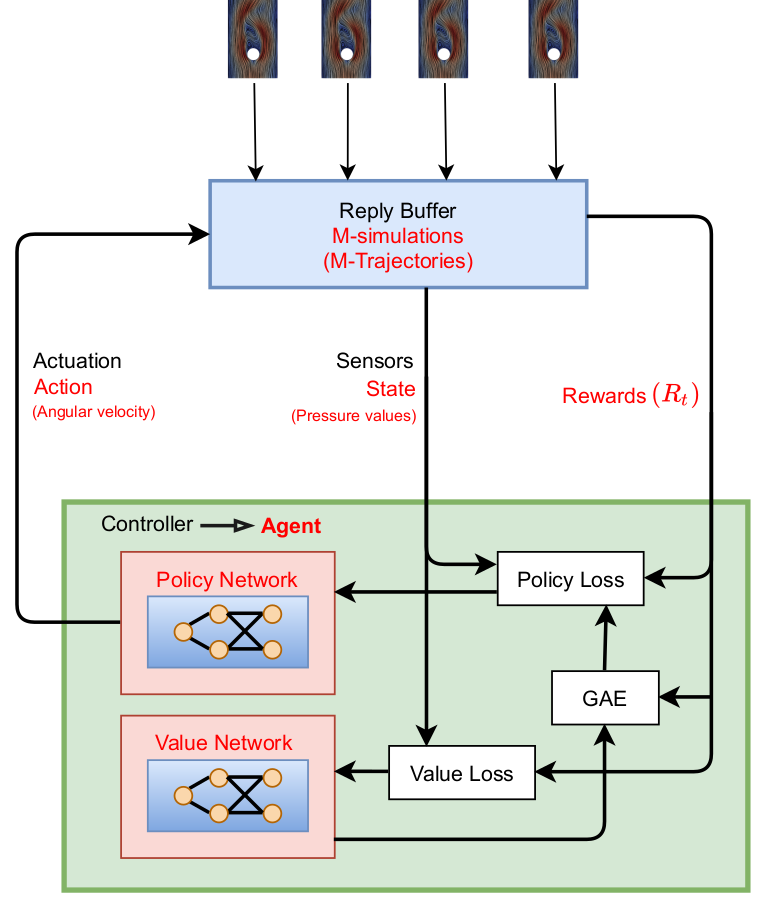
PPO overview; source: figure 4.6 in D. Thummar 2021.
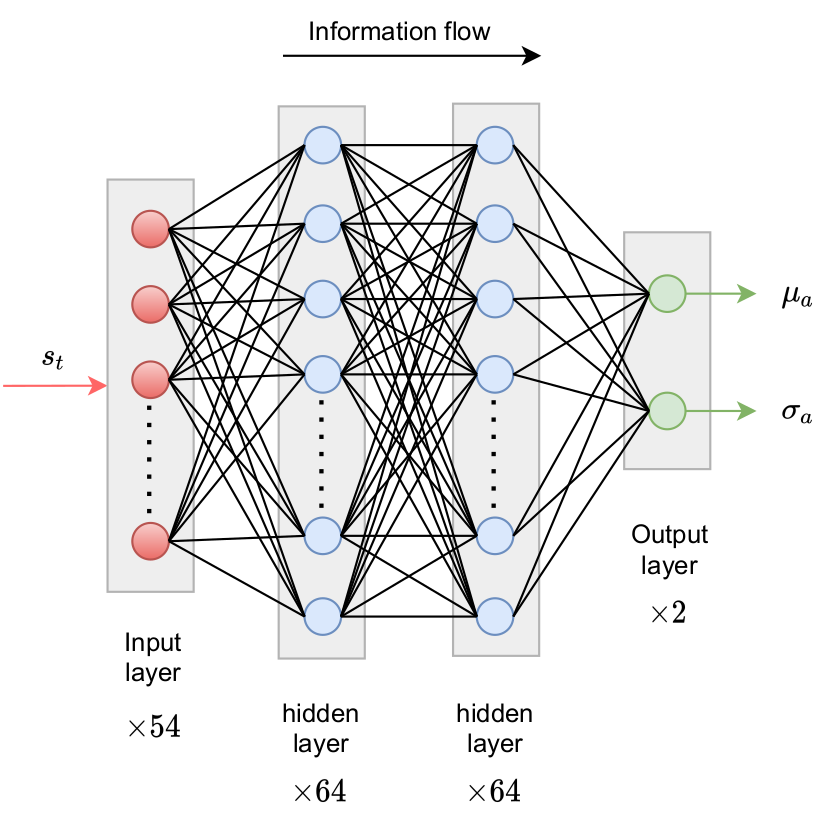
Policy network; source: figure 4.4 in D. Thummar 2021.
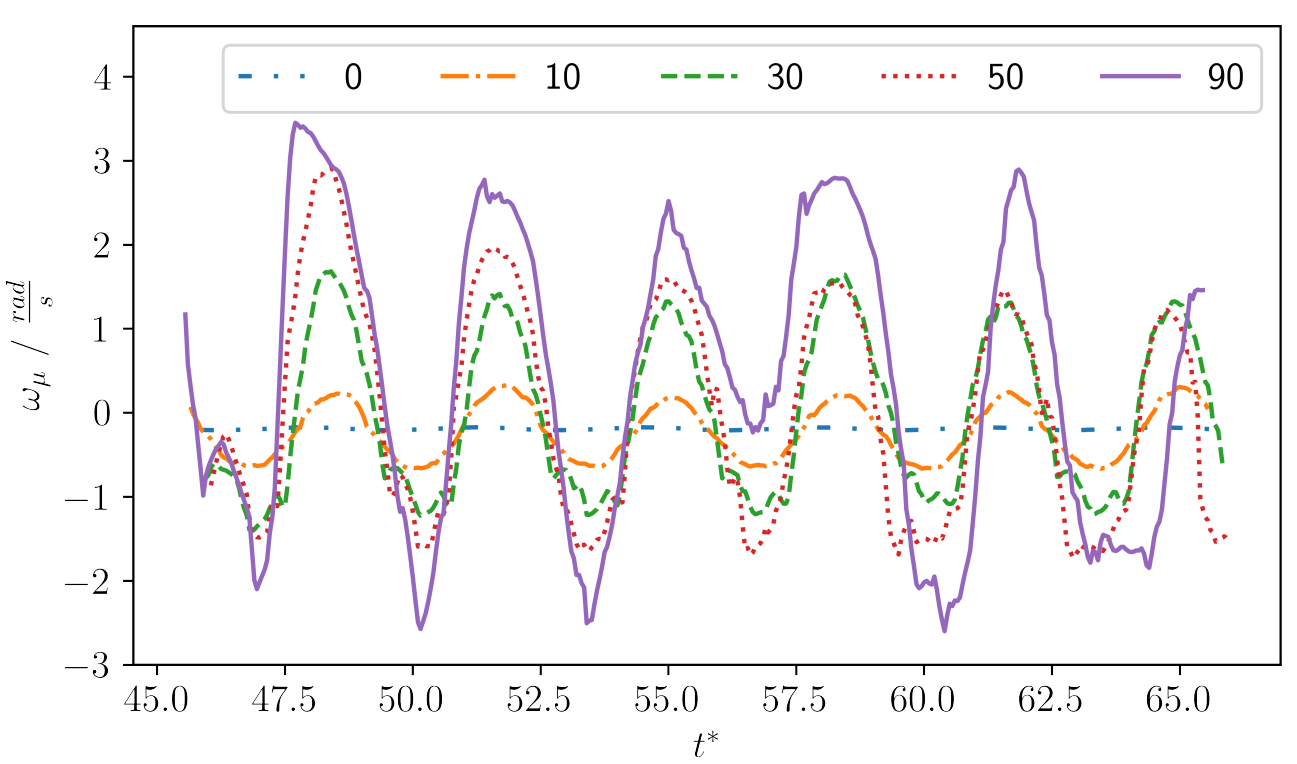
Action of example trajectories in training mode; source: figure 5.2 in F. Gabriel 2021.

Comparison of Gauss and Beta distribution.
learning what to expect in a given state - value function loss
$$ L_V = \frac{1}{N_\tau N} \sum\limits_{\tau = 1}^{N_\tau}\sum\limits_{n = 1}^{N} \left( V(s_n^\tau) - G_n^\tau \right)^2 $$
- $\tau$ - trajectory (single simulation)
- $s_n$ - state/observation (pressure)
- $V$ - parametrized value function
- clipping not included
Was the selected action a good one?
$$\delta_n = R_n + \gamma V(s_{n+1}) - V(s_n) $$ $$\delta_{n+1} = R_n + \gamma R_{n+1} + \gamma^2 V(s_{n+2}) - V(s_n) $$ $$ A_n^{GAE} = \sum\limits_{l=0}^{N-n} (\gamma \lambda)^l \delta_{n+l} $$
- $\delta_n$ - one-step advantage estimate
- $A_n^{GAE}$ - generalized advantage estimate
- $\lambda$ - smoothing parameter
make good actions more likely - policy objective function
$$ J_\pi = \frac{1}{N_\tau N} \sum\limits_{\tau = 1}^{N_\tau}\sum\limits_{n = 1}^{N} \mathrm{min}\left[ \frac{\pi(a_n|s_n)}{\pi^{old}(a_n|s_n)} A^{GAE,\tau}_n, \mathrm{clamp}\left(\frac{\pi(a_n|s_n)}{\pi^{old}(a_n|s_n)}, 1-\epsilon, 1+\epsilon\right) A^{GAE,\tau}_n\right] $$
- $\pi$ - current policy
- $\pi^{old}$ - old policy (previous episode)
- entropy not included
- $J_\pi$ is maximized

Effect of clipping in the PPO policy loss function.
Why PPO?
- continuous and discrete actions spaces
- relatively simple implementation
- restricted (robust) policy updates
- sample efficient
- ...
Refer to R. Paris et al. 2021 and the references therein for similar works employing PPO.
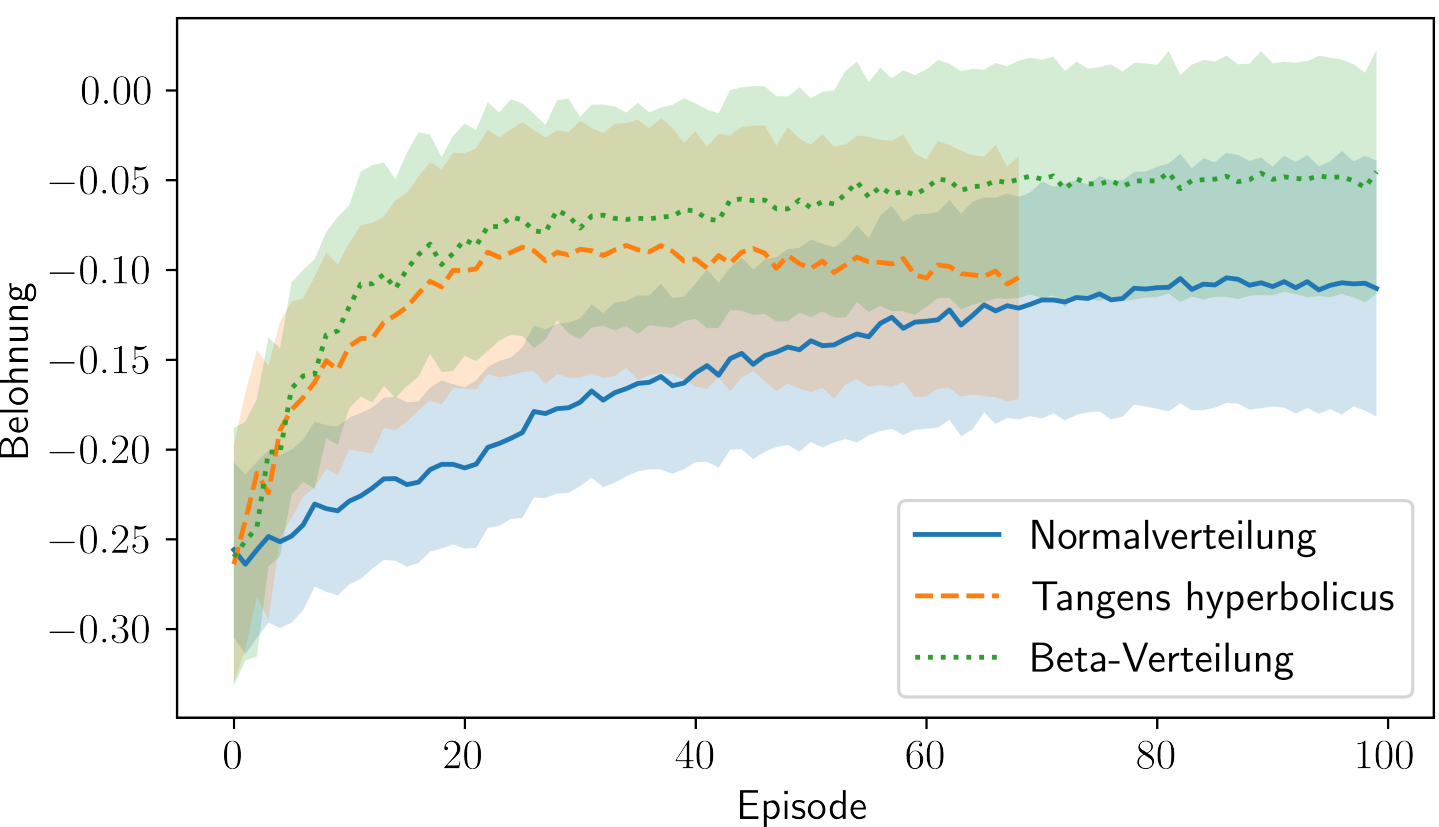
Cumulative reward over the number of training episodes; source: figure 5.8 in F. Gabriel 2021.
Closed-loop flow control with variable Reynolds number; source: F. Gabriel 2021.
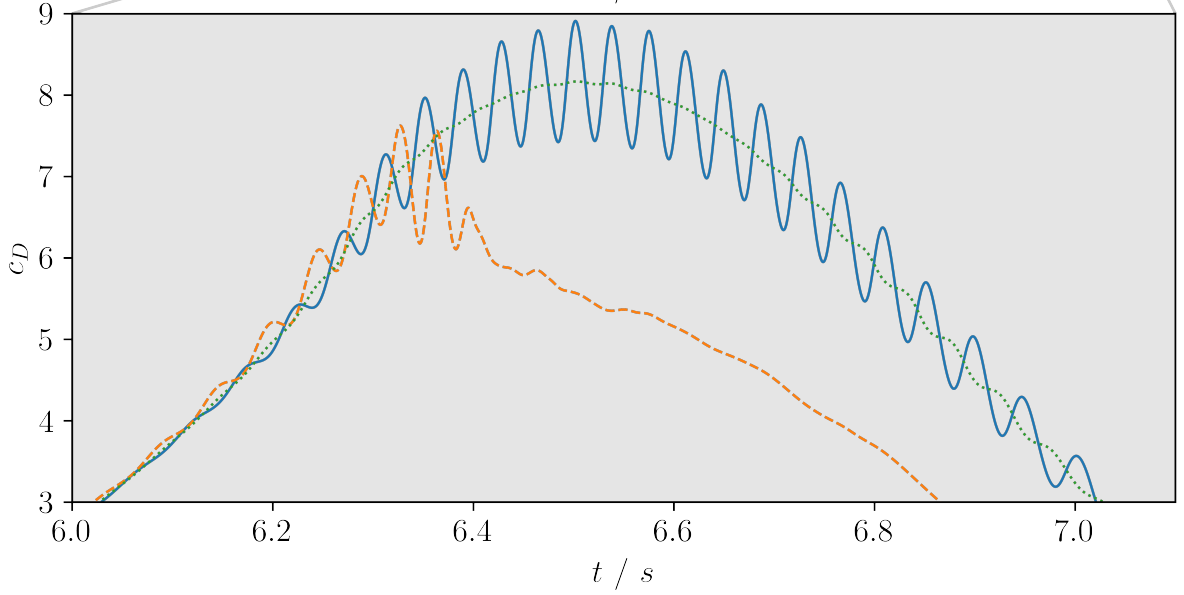
Drag coefficient with and without control; source: figure 6.5 in F. Gabriel 2021.
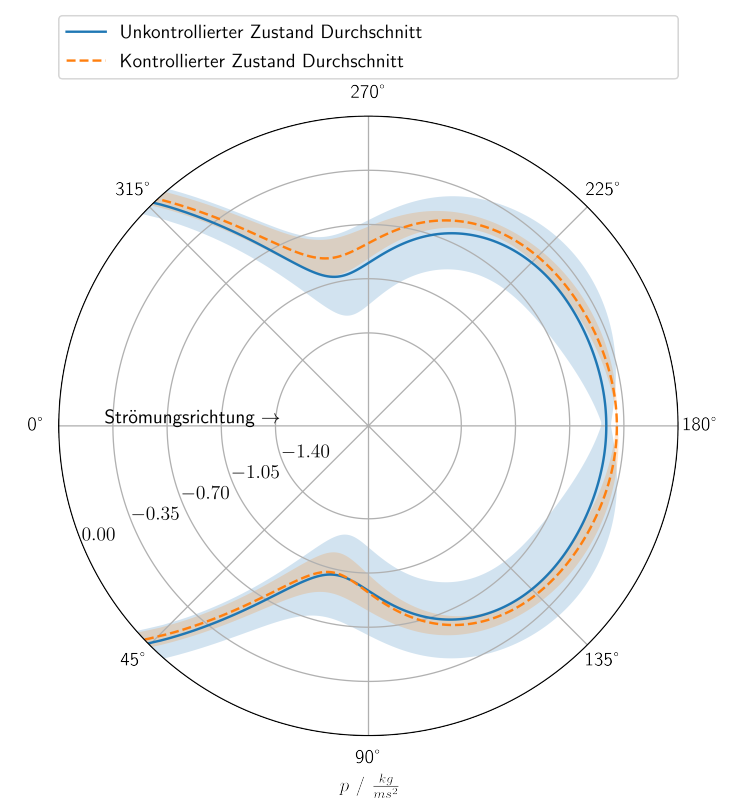
Pressure on the cylinder's surface; source: figure 5.7 in F. Gabriel 2021.