The finite volume method in a nutshell
Andre Weiner
TU Dresden, Institute of fluid mechanics, PSM

These slides and most
of the linked resources are licensed under a
Creative Commons Attribution 4.0
International License.

Last lecture
- course logistics
- reporting issues
- combining ML and CFD
- lecture projects
- technology stack
Outline
The finite volume method (FVM) in a nutshell
- FVM fundamentals
- FVM in OpenFOAM
- FVM in Basilisk
Five essential steps of CFD
Mathematical model
generic convection-diffusion-equation
- $\mathbf{u}$ - velocity vector
- $\Psi$ - generic variable
- $\Gamma$ - diffusivity
- $S_\Psi$ - source term
- $t$ - time
- $\nabla$ - Nabla operator
- $\langle\cdot\rangle$ - dot-product
What are the in individual terms in transient heat conduction?
What are the in individual terms in a chemically reacting flow?
What is missing to be able to solve the equations?

Mathematical problem considered in this lecture.
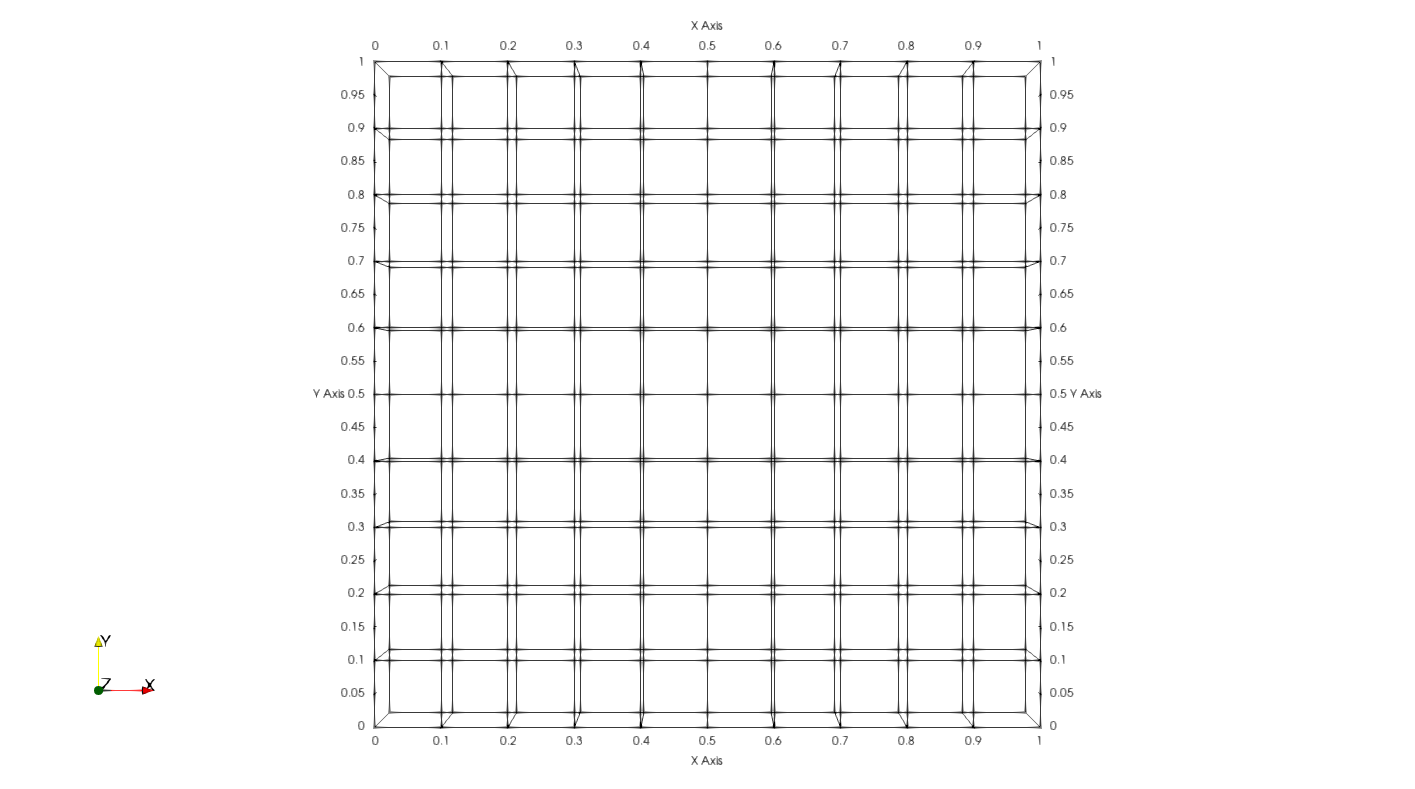
The finite volume mesh
Meshing: subdivide domain into a finite number of discrete elements (control volumes)
Lecture/notebook simplifications:
- structured, Cartesian mesh
- cell-centered variable arrangement

5x5 mesh with grading in $x$.
A class to store the mesh properties
class Mesh(object):
def __init__(self, L_x, L_y, N_x, N_y, grad_x, grad_y):
# snip
self.dx = self._compute_cell_width(L_x, N_x, grad_x)
self.dy = self._compute_cell_width(L_y, N_y, grad_y)
self.x = pt.cumsum(self.dx, 0) - self.dx * 0.5
self.y = pt.cumsum(self.dy, 0) - self.dy * 0.5
# snip
def cell_id(self, i, j) -> int:
return self.N_x * j + i
Python intermezzo: (unit) testing
mesh = Mesh(1.0, 1.0, 5, 5, 1.0, 1.0)
assert pt.allclose(mesh.x, pt.linspace(0.1, 0.9, 5))
mesh = Mesh(1.0, 1.0, 5, 5, 2.0, 1.0)
assert pt.isclose(2.0*mesh.dx[0], mesh.dx[-1])
A class to store fields and boundary conditions
class VolScalarField(object):
def __init__(self, mesh, name, value, bc):
# snip
def visualize(self):
# snip
def __equal__(self, other):
return self is other
Python intermezzo: equality
# test one
a = [1, 2, 3]
b = a
print(a is b, a == b)
# output?
...
# test two
b = a[:]
print(a is b, a == b)
# output?
What changes in an unstructured mesh?
Equation discretization part I - diffusion
Equation discretization: transform PDE + BC/IC into a system of linear equations by means of mesh-based finite PDE approximations for each cell
$$ F\left(T, \partial_t T, \nabla T, ...\right) = 0 \rightarrow \mathbf{Ax} = \mathbf{b} $$
What is the shape of the coefficient matrix for a 5x5 mesh?
What is the length of the source vector for a 5x5 mesh?
A class to store the linear system of equations
class FVMatrix(object):
def __init__(self, matrix, source, field):
self.matrix = matrix
self.source = source
self.field = field
def __add__(self, other):
assert self.field == other.field
return FVMatrix(self.matrix + other.matrix,
self.source + other.source,
self.field)
# snip
Gauss theorem applied to diffusion
$$ \int\limits_V \nabla\cdot\left(\lambda\nabla T\right) \mathrm{d}v =\qquad\qquad\qquad $$
$$ \mathbf{n}_n = \qquad, \mathbf{n}_s = \qquad, \mathbf{n}_e = \qquad, \mathbf{n}_w = \qquad $$
$$ \int\limits_{\partial V} \left(\lambda \nabla T\right)\cdot \mathbf{n} \mathrm{d}o = \qquad\qquad\qquad\qquad\qquad $$

$$ s:\quad \int\limits_{x_i-\Delta x_i/2}^{x_i+\Delta x_i/2} \lambda \partial_y T|_s \mathrm{d}x \approx \lambda\Delta x_i g_{y,s}\qquad w:\quad\int\limits_{y_j-\Delta y_j/2}^{y_j+\Delta y_j/2} \lambda \partial_x T|_w \mathrm{d}y \approx \lambda\Delta y_i \frac{T_{i, j} - T_{w}}{0.5\Delta x_i} $$
$$ a_p T_{i,j} + a_n T_{i, j+1} + a_s T_{i, j-1} + a_e T_{i+1, j} + a_w T_{i-1, j} = b $$
Refer to the lecture notebook for more details.
Function to construct the diffusion FVMatrix
def fvm_laplace(diffusivity: float, field: VolScalarField) -> FVMatrix:
dx, dy = field.mesh.dx, field.mesh.dy
row, col, val = [], [], []
source = pt.zeros(field.mesh.N_x*field.mesh.N_y)
def add_east(i, j):
# snip
def add_west(i, j):
# snip
for i in range(field.mesh.N_x):
for j in range(field.mesh.N_y):
a_e, b_e = add_east(i, j)
a_w, b_w = add_west(i, j)
a_n, b_n = add_north(i, j)
a_s, b_s = add_south(i, j)
add_center(i, j, (a_e, a_w, a_n, a_s))
add_source(i, j, (b_e, b_w, b_n, b_s))
return FVMatrix(pt.sparse_coo_tensor([row, col], val),
source, field)
Combining domain and equation discretization
mesh = Mesh(1.0, 1.0, 5, 5, 1.0, 1.0)
bc = {
"left" : ("fixedValue", 2.0),
"right" : ("fixedGradient", -2.0),
"top" : ("fixedValue", 0.0),
"bottom" : ("fixedGradient", -5.0),
}
T = VolScalarField(mesh, "T", 0.0, bc)
matrix = fvm_laplace(1.0, T)

Coefficient matrix and source vector; blue coeff. are negative; coeff. scaled by absolute value.
Solving a sparse linear system of equations
linear system with two equations and two unknowns
$$ \begin{align} -1x-2y &= 2 \\ -2x-7y &= -5 \end{align} $$high school (direct) solution
$$ \begin{align} & 1)&x &= (2 +2y)/(-1) = -2-2y\\ & 2)&y &= (-5 +2x)/(-7) = 5/7 - 2/7x\\ & 3)&x &= -2 - 2 (5/7 - 2/7x) \rightarrow x = -8\\ & 4) &y &= 5/7 + 16/7 = 3 \end{align} $$Is the solution correct?
$$ \begin{align} -1x-2y -2 &\overset{!}{=} 0 \\ -2x-7y +5 &\overset{!}{=} 0 \end{align} $$testing the solution
$$ \begin{align} & 1) -1x-2y -2 = -1(-8)-2(3) -2 = 0\quad \text{✓}\\ & 2) -2x-7y +5 = -2(-8)-7(3)+5 = 0\quad \text{✓} \end{align} $$problem: does not scale to large systems of equations
alternative: (iteratively) guessing the solution
x, y = 0, 0
TOL = 1e-3
res_jacobi = []
for i in range(50):
x_new = (2 + 2*y) / (-1)
y_new = (-5 + 2*x) / (-7)
x, y = x_new, y_new
res_1 = -1*x - 2*y - 2
res_2 = -2*x - 7*y + 5
res_jacobi.append(sqrt(res_1**2 + res_2**2))
print(f"it. {i+1:d}: x={x:1.4f}, y={y:1.4f}, res={res_jacobi[-1]:1.5f}")
if res_jacobi[-1] < TOL:
print(f"Converged after {i+1} iterations.")
break
intermediate solution and residuals
it. 1: x=-2.0000, y=0.7143, res=4.24745
it. 2: x=-3.4286, y=1.2857, res=3.07724
it. 3: x=-4.5714, y=1.6939, res=2.42711
it. 4: x=-5.3878, y=2.0204, res=1.75842
# snip
it. 31: x=-7.9986, y=2.9995, res=0.00096
Converged after 31 iterations.
Formalizing the Jacobi algorithm
$$ \phi_i^n = \frac{1}{a_{ii}} \left(b_i - \sum\limits_{j=0,\ j\neq i}^{N-1}a_{ij}\phi_j^{n-1} \right) $$- $i$ - cell id
- $n$ - iteration count
- $N$ - number of cells
- $\phi_i$ - solution variable
- $a_{ii}$ - diagonal coefficient
- $b_i$ - source term
LDU-addressing for coefficient matrix $\mathbf{A}$
$$ \mathbf{A} = \mathbf{L} + \mathbf{D} + \mathbf{U} $$
$$ \boldsymbol{\phi}^{n} = \mathbf{D}^{-1}\mathbf{b} - \mathbf{D}^{-1} (\mathbf{L}+\mathbf{U}) \boldsymbol{\phi}^{n-1} $$
residual in vector-matrix-notation
$$ r^n = |\mathbf{b}-\mathbf{A}\boldsymbol{\phi}^n| $$
residual normalization in OpenFOAMmore effective updates
x, y = 0, 0
res_gauss_seidel = []
for i in range(50):
x = (2 + 2*y) / (-1)
y = (-5 + 2*x) / (-7)
res_1 = -1*x - 2*y - 2
res_2 = -2*x - 7*y + 5
res_gauss_seidel.append(sqrt(res_1**2 + res_2**2))
print(f"it. {i+1:d}: x={x:1.4f}, y={y:1.4f}, res={res_gauss_seidel[-1]:1.5f}")
if res_gauss_seidel[-1] < TOL:
print(f"Converged after {i+1} iterations.")
break
intermediate solution and residuals
it. 1: x=-2.0000, y=1.2857, res=2.57143
it. 2: x=-4.5714, y=2.0204, res=1.46939
it. 3: x=-6.0408, y=2.4402, res=0.83965
it. 4: x=-6.8805, y=2.6801, res=0.47980
# snip
it. 16: x=-7.9986, y=2.9996, res=0.00058
Converged after 16 iterations.

Gauss-Seidel vs. Jacobi method.
Formalizing the Gauss-Seidel algorithm
$$ \phi_i^n = \frac{1}{a_{ii}} \left(b_i - \sum\limits_{j=0}^{i-1}a_{ij}\phi_j^n - \sum\limits_{j=i+1}^{N-1} a_{ij}\phi_j^{n-1}\right) $$- $i$ - cell id
- $n$ - iteration count
- $N$ - number of cells
- $\phi_i$ - solution variable
- $a_{ii}$ - diagonal coefficient
- $b_i$ - source term
Gauss-Seidel algorithm using LDU-addressing
$$ \mathbf{D}\boldsymbol{\phi}^{n} = \mathbf{b} - \mathbf{L} \boldsymbol{\phi}^{n} - \mathbf{U} \boldsymbol{\phi}^{n-1} $$
$$ \boldsymbol{\phi}^{n} = (\mathbf{D} + \mathbf{L})^{-1} \mathbf{b} - (\mathbf{D} + \mathbf{L})^{-1} \mathbf{U} \boldsymbol{\phi}^{n-1} $$
Avoiding to store zeros: sparse matrices/tensors
- store non-zero values in a 1D array
- store row ids of non-zero values in a 1D array
- store column ids non-zeros values in a 1D array
# sparse tensor in PyTorch
i = [[0, 1, 1],
[2, 0, 2]]
v = [3, 4, 5]
s = torch.sparse_coo_tensor(i, v, (2, 3))
s.to_dense()
# output
tensor([[0, 0, 3],
[4, 0, 5]])

Memory requirement of dense and sparse matrices.
def gauss_seidel(A, b, x, tol=1.0e-6, max_iter=1000):
res_iter = []
for it in range(max_iter):
for i in range(x.shape[0]):
row_sum = 0.0
for row, col in zip(*A._indices()):
if row == i and col != i:
row_sum += (A[row, col] * x[col]).item()
x[i] = (b[i] - row_sum) / A[i, i]
res_iter.append(pt.linalg.norm(b - A.mv(x)).item())
if res_iter[-1] < tol:
# snip
Implementation of a simple Gauss-Seidel solver.
More efficient: LDU addressing.
Putting it all together
mesh = Mesh(1.0, 1.0, 5, 5, 1.0, 1.0)
bc = {
"left" : ("fixedValue", 2.0),
"right" : ("fixedGradient", -2.0),
"top" : ("fixedValue", 0.0),
"bottom" : ("fixedGradient", -5.0),
}
T = VolScalarField(mesh, "T", 0.0, bc)
matrix = fvm_laplace(0.1, T)
Tsol = gauss_seidel(matrix.matrix, matrix.source, matrix.field.internal_field.flatten(), tol=1.0e-2)
T = VolScalarField(mesh, "T", Tsol.reshape(5, 5), bc)

Cell-centered solution.

Refined cell-centered solution.

Influence of refinement on convergence.
Linear solvers in CFD are typically iterative
advantages of iterative solvers
- low memory usage
- low computational cost
disadvantages: less robust
Equation discretization part II - convection
Gauss theorem applied to convection
$$ \int\limits_V \nabla\cdot\left(\mathbf{u} T\right) \mathrm{d}v =\qquad\qquad\qquad $$
$$ \int\limits_{\partial V} \mathbf{u} T \cdot \mathbf{n} \mathrm{d}o = \qquad\qquad\qquad\qquad\qquad $$
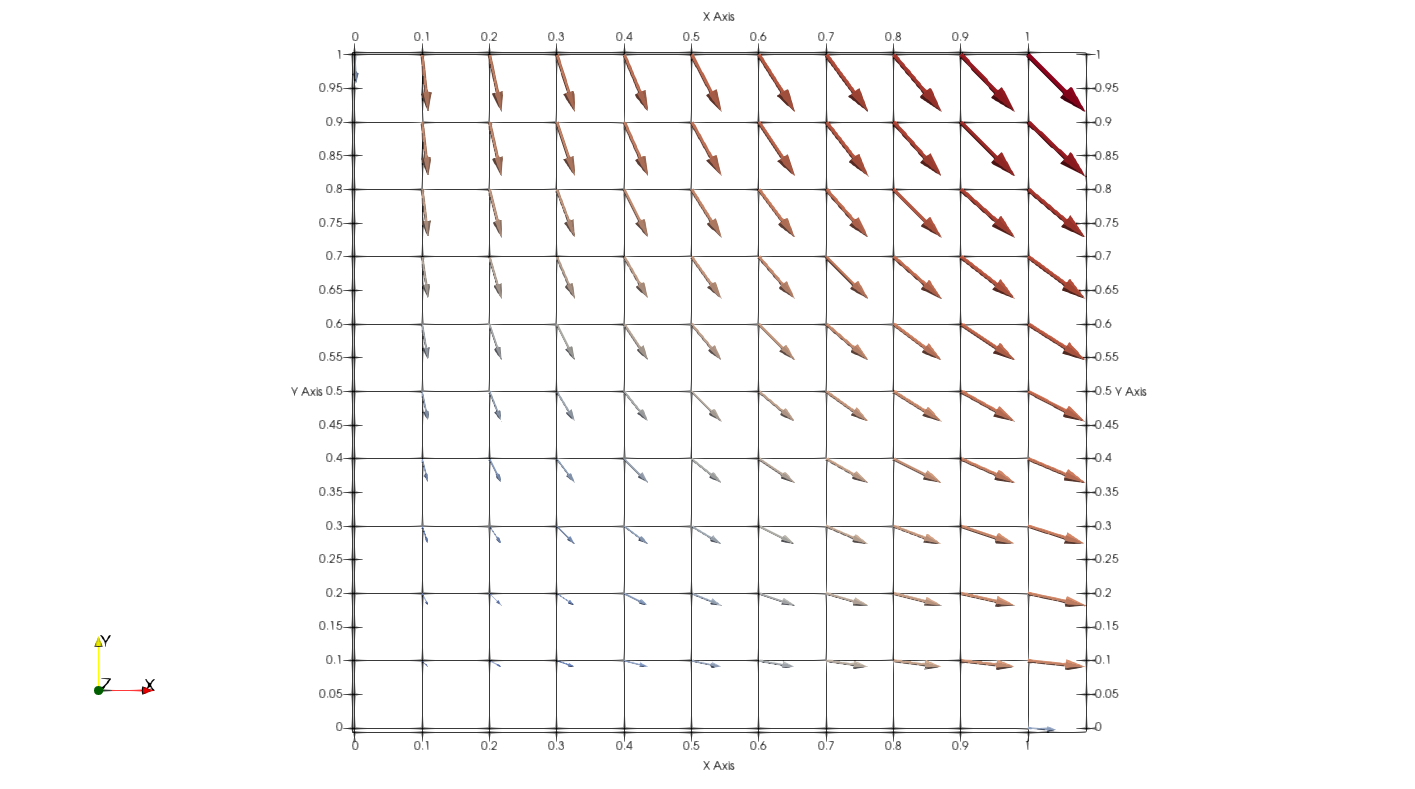
Power law with $n=2$ (source):
$$ \psi = 2 Axy $$ $$ \mathbf{u}(x,y) = (\partial_y \psi, -\partial_x \psi)^T = (2Ax, -2Ay)^T $$

Stream function $\psi = 2 Axy$ and velocity vector $\mathbf{u}(x,y) = (2Ax, -2Ay)^T$.

Velocity vectors in the cell centers and on the surface.
A field type for surface vector fields
class SurfaceVectorField(object):
def __init__(self, mesh, name, value_x, value_y):
self.mesh = mesh
self.name = name
self.surface_field_x = pt.ones((mesh.N_x + 1, mesh.N_y)) * value_x
self.surface_field_y = pt.ones((mesh.N_x, mesh.N_y + 1)) * value_y
def x(self):
return self.surface_field_x
def y(self):
return self.surface_field_y
# snip
$$ s:\quad \int\limits_{x_i-\Delta x_i/2}^{x_i+\Delta x_i/2} u_y T|_s \mathrm{d}x \approx u_{y,s}\Delta x_i (T_{i,j}-0.5 g_{y,s} \Delta y_j)\qquad w:\quad\int\limits_{y_j-\Delta y_j/2}^{y_j+\Delta y_j/2} u_x T|_w \mathrm{d}y \approx u_{x,w}\Delta y_j T_w $$
Function to construct the convection FVMatrix
def fvm_div(vel: SurfaceVectorField,
field: VolScalarField) -> FVMatrix:
# snip
return FVMatrix(pt.sparse_coo_tensor([row, col], val),
source, field)
Combining domain and equation discretization
mesh = Mesh(1.0, 1.0, 5, 5, 1.0, 1.0)
vel = create_surface_velocity_field(mesh, 1.0)
bc = {
"left" : ("fixedValue", 2.0),
"right" : ("fixedGradient", -2.0),
"top" : ("fixedValue", 1.0),
"bottom" : ("fixedGradient", -5.0),
}
T = VolScalarField(mesh, "T", 0.0, bc)
matrix = fvm_div(vel, T)

Coefficient matrix and source vector; blue coeff. are negative; coeff. scaled by absolute value.
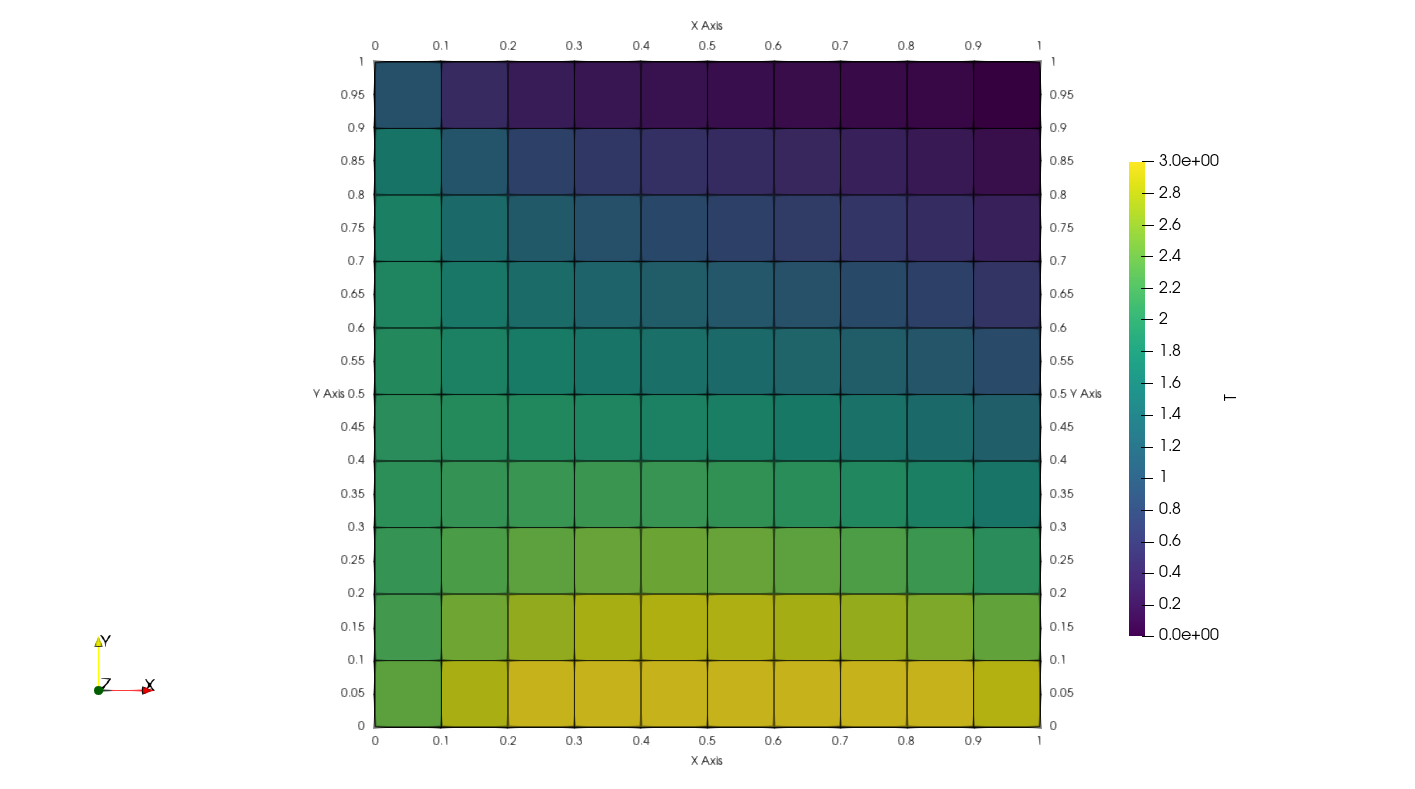
Putting it all together
mesh = Mesh(1.0, 1.0, 10, 10, 1.0, 1.0)
vel = create_surface_velocity_field(mesh, 0.05)
bc = {
"left" : ("fixedValue", 2.0),
"right" : ("fixedGradient", -2.0),
"top" : ("fixedValue", 1.0),
"bottom" : ("fixedGradient", -5.0),
}
T = VolScalarField(mesh, "T", 0.0, bc)
pde = fvm_div(vel, T) - fvm_laplace(0.1, T)
Tsol, res_coarse = gauss_seidel(
pde.matrix, pde.source,
pde.field.internal_field.flatten(),
tol=1.0e-6
)
T = VolScalarField(mesh, "T", Tsol.reshape(10, 10), bc)

Solution converged to $res=9.53\times 10^{-7}$ in 358 iterations.
What could happen if the molecular diffusivity is decreased?
How does a $\partial_t T$ term alter the LSE?
How do I know if the solution is trustworthy?
The FVM in OpenFOAM
Goal: reproduce simulation results in OpenFOAM
$\rightarrow$ test_cases/corner_flow
Instructions provided in the lecture notebook.
output of tree -L 3
├── 0
│ ├── T
│ └── U
├── 0.org
│ ├── T
│ └── U
├── 1
│ ├── phi
│ ├── T
│ └── U
├── Allclean
├── Allrun
├── constant
│ ├── polyMesh
│ │ ├── boundary
│ │ ├── faces
│ │ ├── neighbour
│ │ ├── owner
│ │ └── points
│ └── transportProperties
├── log.blockMesh
├── log.scalarTransportFoam
├── log.setExprFields
├── post.foam
└── system
├── blockMeshDict
├── controlDict
├── fvSchemes
├── fvSolution
└── setExprFieldsDict
system/blockMeshDict
scale 1.0;
vertices
(
(0 0 0)
(1 0 0)
(1 1 0)
(0 1 0)
(0 0 0.1)
(1 0 0.1)
(1 1 0.1)
(0 1 0.1)
);
blocks
(
hex (0 1 2 3 4 5 6 7) (10 10 1) simpleGrading (1 1 1)
);
edges
(
);
boundary
(
top
{
type patch;
faces
(
(3 7 6 2)
);
}
bottom
{
type wall;
faces
(
(1 5 4 0)
);
}
right
{
type patch;
faces
(
(2 6 5 1)
);
}
left
{
type wall;
faces
(
(0 4 7 3)
);
}
frontAndBack
{
type empty;
faces
(
(0 3 2 1)
(4 5 6 7)
);
}
);
OpenFOAM mesh created by blockMesh.
system/exprFieldsDict
expressions
(
U
{
field U;
dimensions [0 1 -1 0 0 0 0];
variables
(
"A = 0.05"
);
expression
#{
vector (2*A*pos().x(), -2*A*pos().y(), 0.0 )
#};
}
);
Velocity field initialized with setExprFields.
0.org/T
dimensions [0 0 0 1 0 0 0];
internalField uniform 0;
boundaryField
{
top
{
type fixedValue;
value uniform 1.0;
}
bottom
{
type fixedGradient;
gradient uniform 5.0;
}
right
{
type fixedGradient;
gradient uniform -2.0;
}
left
{
type fixedValue;
value uniform 2.0;
}
frontAndBack
{
type empty;
}
}
constant/transportProperties
DT 0.1;
system/fvSchemes
ddtSchemes
{
default steadyState;
}
gradSchemes
{
default Gauss linear;
}
divSchemes
{
default none;
div(phi,T) Gauss linear;
}
laplacianSchemes
{
default none;
laplacian(DT,T) Gauss linear orthogonal;
}
system/fvSolution
solvers
{
T
{
solver smoothSolver;
smoother GaussSeidel;
tolerance 1e-06;
relTol 0.0;
}
}
Compare the source code of scalarTransportFoam with the Python implementation.
How can I test the setup for pure diffusion?
How can I test the setup for pure convection?
OpenFOAM solution for pure diffusion.
Python solution for pure diffusion.
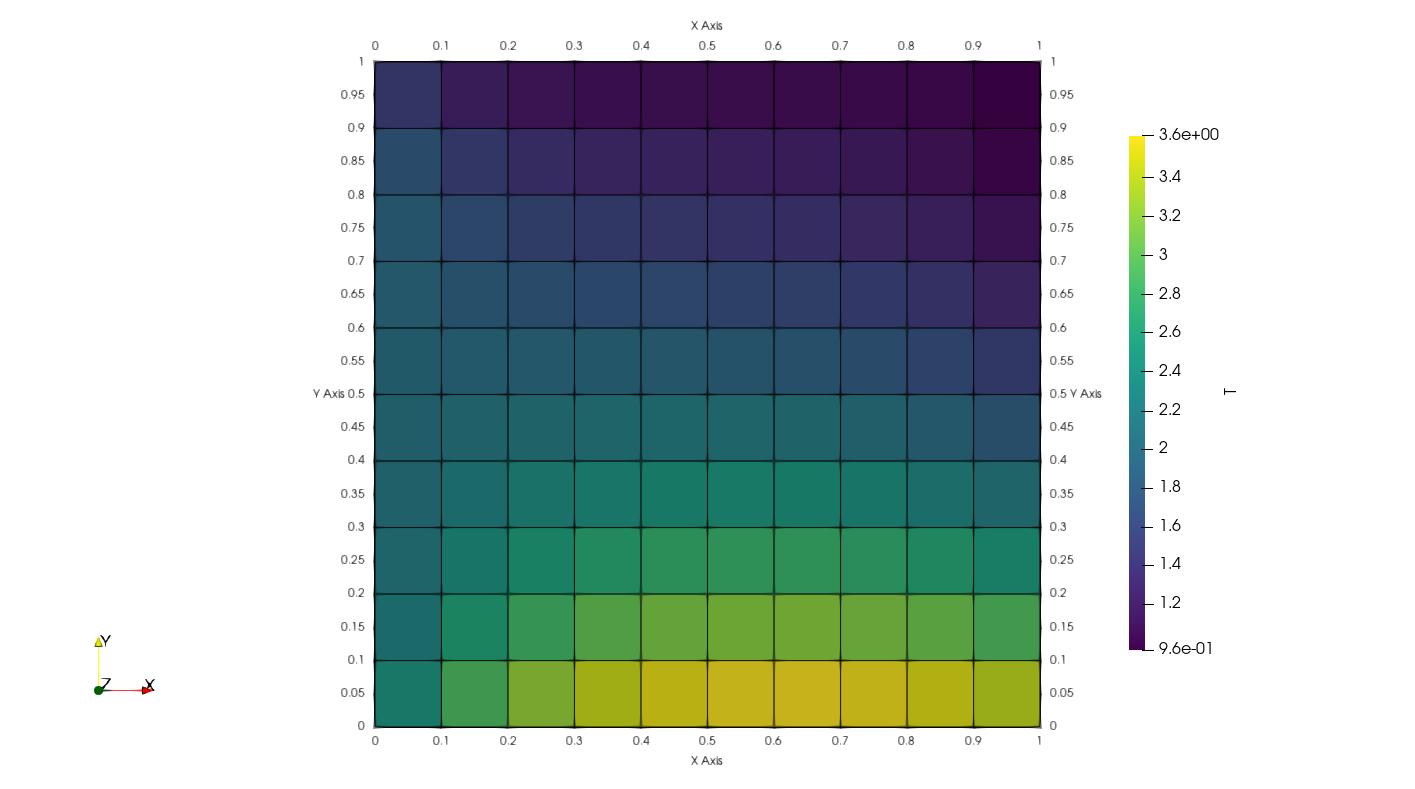
Solution converged to $res=9.75\times 10^{-7}$ in 364 iterations.
Python solution for convection and diffusion.
The FVM in Basilisk
A minimal list of keywords and properties
- adaptive quadtree/octree meshes
- 2nd order FVM (space and time)
- geometric convective transport (VoF)
- very accurate approximation of surface tension
$\rightarrow$ more information at basilisk.fr
Axis-symmetric rise of a spherical-cap bubble.
Check this example for 3D simulations.